
Запускаем дронов!

Дроны - как керосин. Они есть везде.
Еще года два назад это было просто еще одно интересное видео на Ютубе. Год назад они вдруг оказались в интернет магазинах. Затем просочились в рекламу на ТВ, и вот теперь - они есть и в OpenComputers!
Пришла пора с ними разобраться.
1. Матчасть
Дрон, в данном случае - квадрокоптер, это беспилотный летающий аппарат, приводимый в движение двумя парами горизонтальных винтов. Приостановливая вращение винтов с одного боку, дрон двигается в сторону (стрейф).
Эти винты вращаются в разном направлении (два - по часовой срелке и два - против), за счет чего дрон не нуждается в стабилизирующем хвостовом пропеллере (как вертолет). За счет этого же он и разворачивается в воздухе, замедлив вращение однонаправленной пары винтов.
Дрон обладает небольшой массой, для экономии энергии, которой у него не много (на 10-30 минут полета в среднем).
(с) Википедия
2. Дроны и OpenComputers
Приблизительное изображение дрона в OpenComputers =):

В мире Майнкрафта дрон представляет из себя "сущность" (Entity). Это значит, что он обладает возможностями мобов Майнкрафта. (В то время как робот - это блок.)
Его можно сдвинуть с места толкая. Он умеет пролетать сквозь двери и калитки (в отличии от робота). Он движется не последовательно, из блока в блок, а из точки в точку. Причем маршрут может лежать по диагонали.
Конечно, движется он по кратчайшей линии, и если на пути окажется стена - дрон столкнется с нею.
Программирование дрона как две капли воды похоже на программирование микроконтроллера. Вы точно так же записываете программу на EEPROM, и при необходимости меняете ее на верстаке.
Только в отличии от контроллера, вам становится доступен новый компонент: drone.
Подробнее об командах дрона можно узнать здесь: OpenComputers/Дрон. (Или здесь: ocdoc.wiki (англ.))
3. План
Нужна какая-нибудь несложная задача, для целей эксперимента. Используем программку send из предыдущего поста, для удаленного управления. Зальем ее на планшет.
А дрон пусть... носит свиней. Будем оригинальными и непоследовательными.
1. Команда 'add X Y Z Name From'. Добавляем точку Name к маршруту, цепляя ее к точке From.
Зададим дрону последовательность точек, которые образуют граф - безопасные маршруты.
2. Команда 'catch' - дрон ловит свинью.
3. Команда 'drop' - дрон выпускает свинью.
4. Команда 'to X' - дрон летит в точку Х.
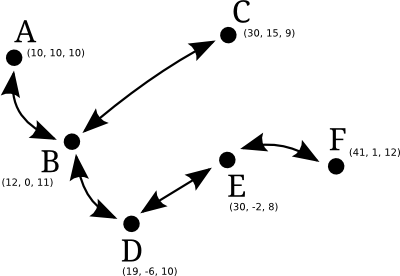
Для начала не будем особо заморачиваться с графом маршрутов. Это будет простое неориентированное дерево.
Примерно такое:
4. Строим полигон
Построим что-нибудь подходящее для тестов. Отметим ключевые точки будущего графа красными блоками.
А синий блок - будет стартовой площадкой дрона.

Поскольку я играю без модов на энергию, мой планшет и дрон будут работать вечно. И я не заморачиваюсь станцией подзарядки.
Иначе, к схеме выше было бы необходимо добавить станцию, где дрон мог бы зарядить аккумулятор.
5. Пишем программу
Скрипт для удаленного управления скопипастим из прошлого поста, подправим, чтобы умела отправлять несколько переменных и зальем на планшетик, для удобства.
(Для этого, соберите планшет - не забудьте клавиатуру и видеокарту! - положите его в зарядник и запустите с подключенного компа команду install. Укажите адрес винчестера планшета - и все, что было у вас на компе автоматически загрузится в планшет, включая даже ваши собственные программы.)
local com = require('component')
local modem = com.modem
local args = {...}
modem.broadcast(27, table.unpack(args))
io.write("Message: ")
print(table.unpack(args))
Далее - более сложная часть. Программа дрона. Программа предназначена для EEPROM. Значит соблюдаем те же правила: используем computer, component и API имеющихся у дрона компонентов. Включая его родной компонент drone.
В нашем случае, дрон вооружен апргейдом-лассо (leash) и беспроводной сетевой картой (modem) для связи.
Стоит отметить, что процесс отладки программы (по крайней мере в текущем билде мода) достаточно неудобен. В случае ошибки дрон отказывается включиться, издав тонкий писк, и не выводя никакой информации. Получить отчет об ошибке при помощи анализатора не выйдет - ведь Shift+ПКМ просто снимает дрона. Автор обещал в скором времени это исправить. Ну а пока - помучаемся.
Отредактировать чип в стороннем редакторе, не вынимая его из дрона тоже не выйдет. В отличии от файловых систем, которые имеют удобную папку вида /saves/World/opencomputers/xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx/, чипы EEPROM хранят свой код в NBT тегах предмета. Этим же обусловлено и ограничение размера кода в 4 килобайта.
5.1. Основная часть
Это цикл который ждет указаний, а затем запускает соответствующую функцию.
drone = component.proxy(component.list("drone")())
modem = component.proxy(component.list("modem")())
leash = component.proxy(component.list("leash")())
modem.open(27)
route = {}
path = {}
current = ""
while true do
name, _, sender, _, _, message, x, y, z, point, from = computer.pullSignal(1)
if name == "modem_message" then
if message == 'add' then
add(tonumber(x), tonumber(y), tonumber(z), point, from)
if current == "" then
current = point
end
elseif message == 'to' then
to(x)
elseif message == 'catch' then
catch()
elseif message == 'drop' then
drop()
end
end
if #path > 0 and drone.getOffset() < 1 then
drone.move(route[path[#path]].x-route[current].x,
route[path[#path]].y-route[current].y,
route[path[#path]].z-route[current].z)
current = path[#path]
path[#path] = nil
end
end
modem.close()
Чтобы облегчить себе жизнь (и тестирование bios), вы можете сделать так: напишите заглушку для компонента drone (и других, если надо), вроде этой: http://pastebin.com/EVYzN5Bj
Просто скопируйте в папку на компьютере, где вы пишете программу для дрона.
Затем измените первые строки программы следующим образом:
component = require('component')
computer = require('computer')
drone = require('drone')
modem = component.modem
-- leash = component.proxy(component.list("leash")())
Затем добавьте в цикл условие выхода по нажатию кнопки:
if name == 'key_down' then break end
И вы можете просто запустить вашу программу для дрона на компьютере.
Разумеется полноценной эмуляцией дрона тут и не пахнет, зато очень удобно отслеживать глупые синтаксические и логические ошибки.
Как устроен код основного цикла?
Переменная route - хранит таблицу "вейпоинтов" (waypoints). Это вершины графа и информация о связях между ними.
Переменная path - хранит путь от текущей вершины до цели.
Переменная current - отмечает текущее местоположение дрона в графе.
В цикле мы читаем получаемые сообщения и вызываем соответствующие функции. Первая переданная вершина считается дроном текущей.
Во второй части цикла происходит проверка. Если путь до цели - не пуст (это значит, что дрону надо куда-то лететь) и дрон уже долетел до текущей вершины (getOffset()), то программа берет следующую вершину из path, отправляет дрона к ней и объявляет ее текущей.
5.2. Функции-команды
Теперь последовательно добавим функции для каждой команды.
function add(x, y, z, name, from)
route[name] = {x=x, y=y, z=z, link = {}}
if from ~= nil then
if route[name] == nil or route[from] == nil then
drone.setStatusText("Error!")
else
table.insert(route[name].link, from)
table.insert(route[from].link, name)
end
end
end
Тут все просто. Пишем вершину в список. Если он связана с другой вершиной (from ~= nil), то в специальную табличку link заносим две связи: из name в from, и из from в name.
function search(target, point, prev)
for key, name in pairs(route[point].link) do
if name == target then
table.insert(path, point)
return true
end
end
for key, name in pairs(route[point].link) do
if name ~= prev then
if search(target, name, point) then
table.insert(path, point)
return true
end
end
end
return false
end
function to(name)
path = {}
table.insert(path, name)
search(name, current)
end
Функция to обнуляет старый путь (на всякий случай), затем вставляет в него цель пути (name) и запускает функцию search, которая рекурсивно ищет и записывает остальные промежуточные вершины на маршруте от name до current (текущей локации).
Функция search сделана достаточно примитивно (возможно вы предложите более эффективный способ?). Поскольку мы договорились, в целях упрощения использовать граф-дерево (не содержаший петель), от любой точки к другой существует один и только один маршрут, который функция и находит перебором связанных вершин.
function catch()
for c = 2, 5 do
if leash.leash(c) then
return true
end
end
return false
end
function drop()
leash.unleash()
end
Тут все элементарно.
6. Подготовка
Пишем программу на дрона, заряжаем планшет и выдвигаемся в зону действий. Дрона ставим на синий куб (стартовая площадка) и включаем.

После уточнения на местности, составляем карту вейпоинтов и строим на бумажке будущий граф:
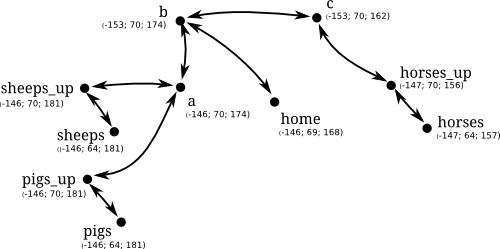
Для каждого загона добавлены две точки - name и name_up. Основные "трассы" дрона лежат на высоте в 6 блоков. А в каждом загоне спускаются к земле. (Чтобы заарканить животное, выстреливая лассо вбок, дрону желательно находиться на одном уровне с жертвой).
С планшета вносим координаты в память дрона. Примерно так:
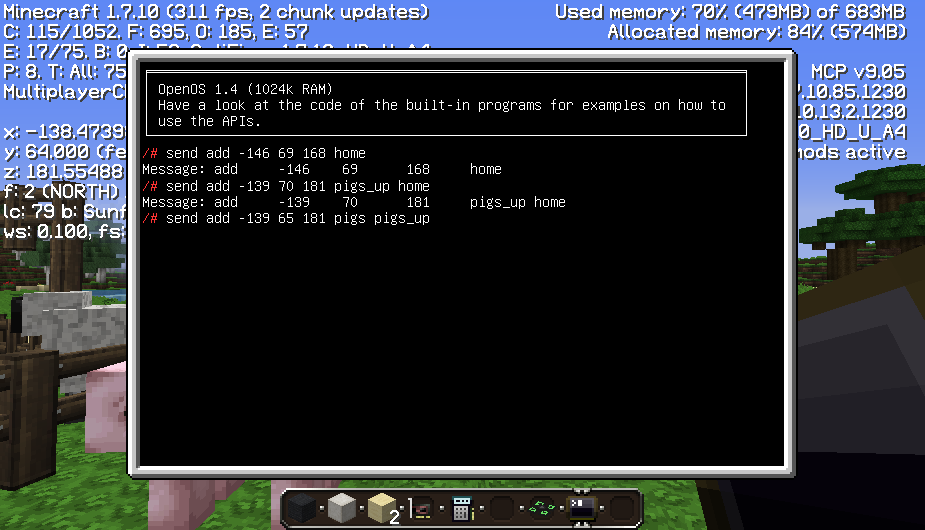
Главное - не ошибиться. Т.к. в код не была добавлена защита "от дурака" =)
Алгоритм позволяет добавлять вершину "на лету". В любой момент вы можете добавить еще одну ветку к схеме.
Теперь все готово к тесту.
7. Запуск
Все готово.
Проверим, как он двигается.
Введем send to sheeps в консоль планшета. Дрон уверенно поднимается в воздух и опускается в загоне в овцами.
Теперь введем send to pigs. Функция search снова вычислит путь и робот переместится в указанную вершину:

Функции catch и drop тоже работают штатно =)

Хотя и не лишены некоторых глюков (ведь физика веревки не просчитывается):

8. Итоги
а) Дрон - любопытная штуковина.
б) Полный код прошивки. использованный в этом посте - здесь: http://pastebin.com/Cy1UR6vy
в) Навигация по вейпоинтам - интересный и очень распространенный способ организации сложного движения. Схему можно усложнить - опционально добавлять только одну связь в таблицу link - тогда получатся ребра с односторонним движением. Добавить петли, оптимизировать поиск кратчайшего пути.
Еще можно облегчить правление дроном - хранить все команды для конкретной задачи в виде файла-скрипта, который запускать одной командой и т.д.
Enjoy!
-
 23
23
-
 1
1
19 комментариев
Рекомендуемые комментарии